
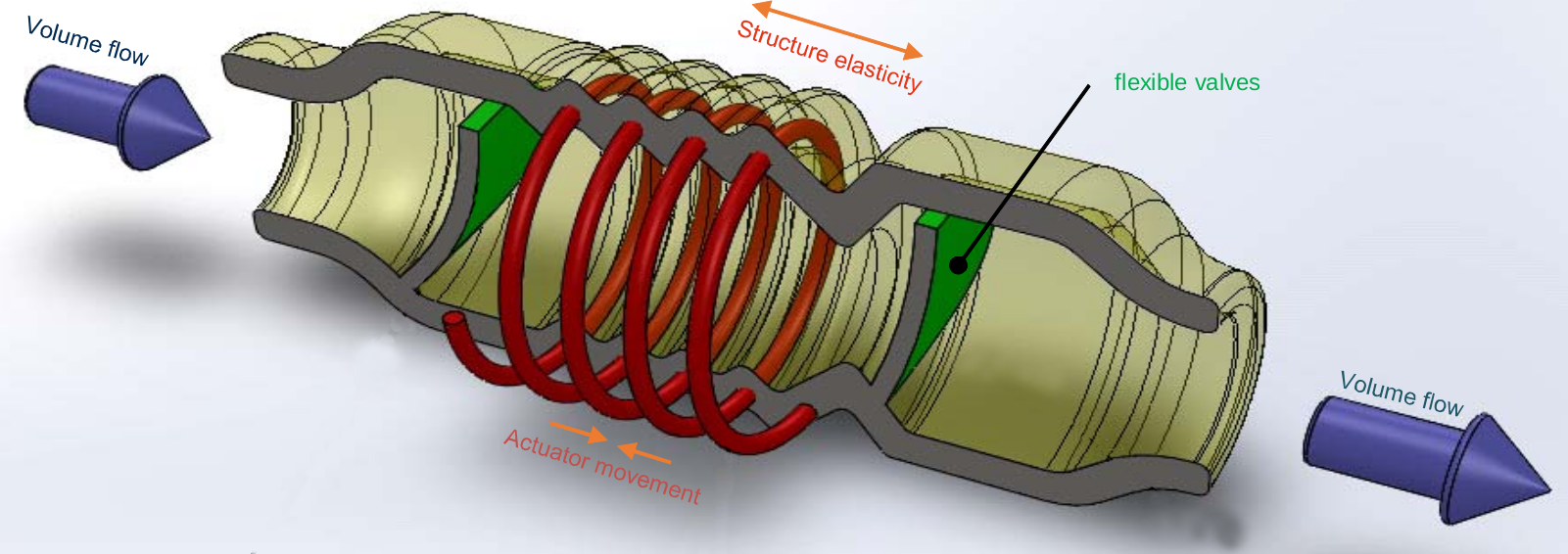
Aim of this project is the development of a soft material energy converter or actuator that is used as a pump in high pressure environment of deep sea. Deep-sea applications put high demands on hardware in terms of robustness and simplicity. Existing underwater systems require pressure compensation and therefore result in complex and often heavyweight designs. From this perspective, soft materials possess many advantageous properties as they allow designs of integral structures that can contain an actuator unit inside an elastic matrix serving also as hinges for the actuator movement. Moreover, soft material can serve as supporting structure by using of buoyancy in underwater applications. Such a pressure-tolerant system is independent of pressure compensation by additional hulls as used today.
Using genetic algorithms, different locomotion principles will be explored by the coupled simulation of fluid and structure dynamics. Simulations will be carried out by the Immersed Boundary Method, that is widely used in this field. In a subsequent step a demonstrator is going to be build - based on the acquired knowledge from simulations. A focus is put on the ability to change the robots stiffness in operation to further exploit the coupled fluid-structure dynamics for locomotion. In cooperation with the German Research Center for Artificial Intelligence GmbH Robotics Innovation Center (DFKI RIC) the final system will be made and verified within the underwater facility of DFKI RIC Bremen, allowing for further optimizations, specifically on the actuators' controller.



