Robotic granular grippers, which exploit the process of granular jamming to manipulate a vast range of diverse objects, represent a hugely promising nascent technology with potential applicability spanning almost all industrial sectors. While these soft-robotic grippers carry the potential to prove transformative to the modern manufacturing process, current-generation systems remain unoptimised and unreliable, and their microscopic dynamics and structures almost entirely unresearched.
The goal of this project is to develop a new breed of highly-adaptable robotic gripper systems whose function can be rapidly and autonomously optimised for the strong, precise and safe manipulation of a vast range of objects. Our work will take the novel approach of applying numerical particle simulation methods coupled with artificial evolution algorithms both to develop new designs via virtual prototyping, and to calibrate and refine the operation of the prototypes themselves. Further, these computational methods will be used to drive novel machine-learning processes, enabling our systems to instantaneously ‘learn’ how best to manipulate new ‘classes’ of objects when encountered.
The computational approach pioneered here will allow the aforementioned tasks to be performed more rapidly, more safely, more easily, and at a reduced cost as compared to conventional techniques involving physical prototypes. Our unique methodology also enables us to explore more venturesome, ‘high-risk, high reward’ new designs without fearing the costs of failure.
In addition to developing advanced techniques for the design and optimisation of granular gripper systems, we will also create and test – both in simulation and physically – a new generation of grippers whose strength and adaptability are enhanced via the use of internal piezoelectric transducers capable of producing targeted patterns of localised granular fluidisation and arrest, combined with a novel ‘compartmentalised’ internal structure.
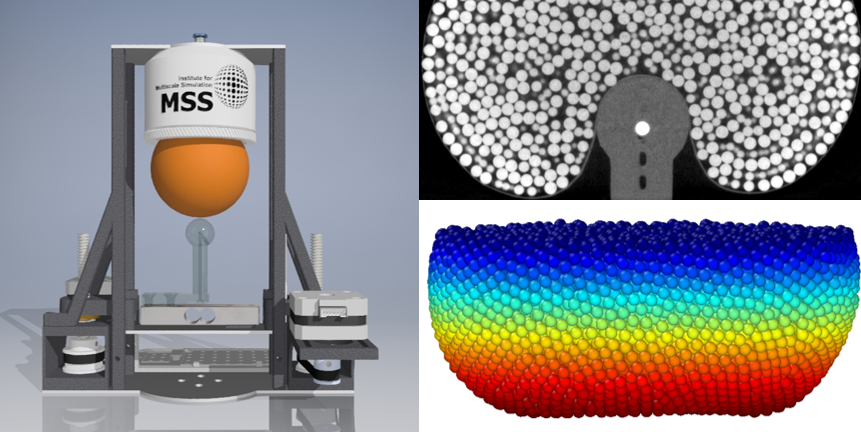
Finally, we will conduct a first, in-depth experimental study concerning the interior dynamics and structure of operational granular gripper systems using state-of-the-art three-dimensional imaging techniques including Positron Emission Particle Tracking and X-ray computed tomography. The detailed information obtained will allow us to connect the macroscopic behaviours of granular grippers to their microscopic details, thus enabling us to further our understanding of these important systems on a fundamental level.