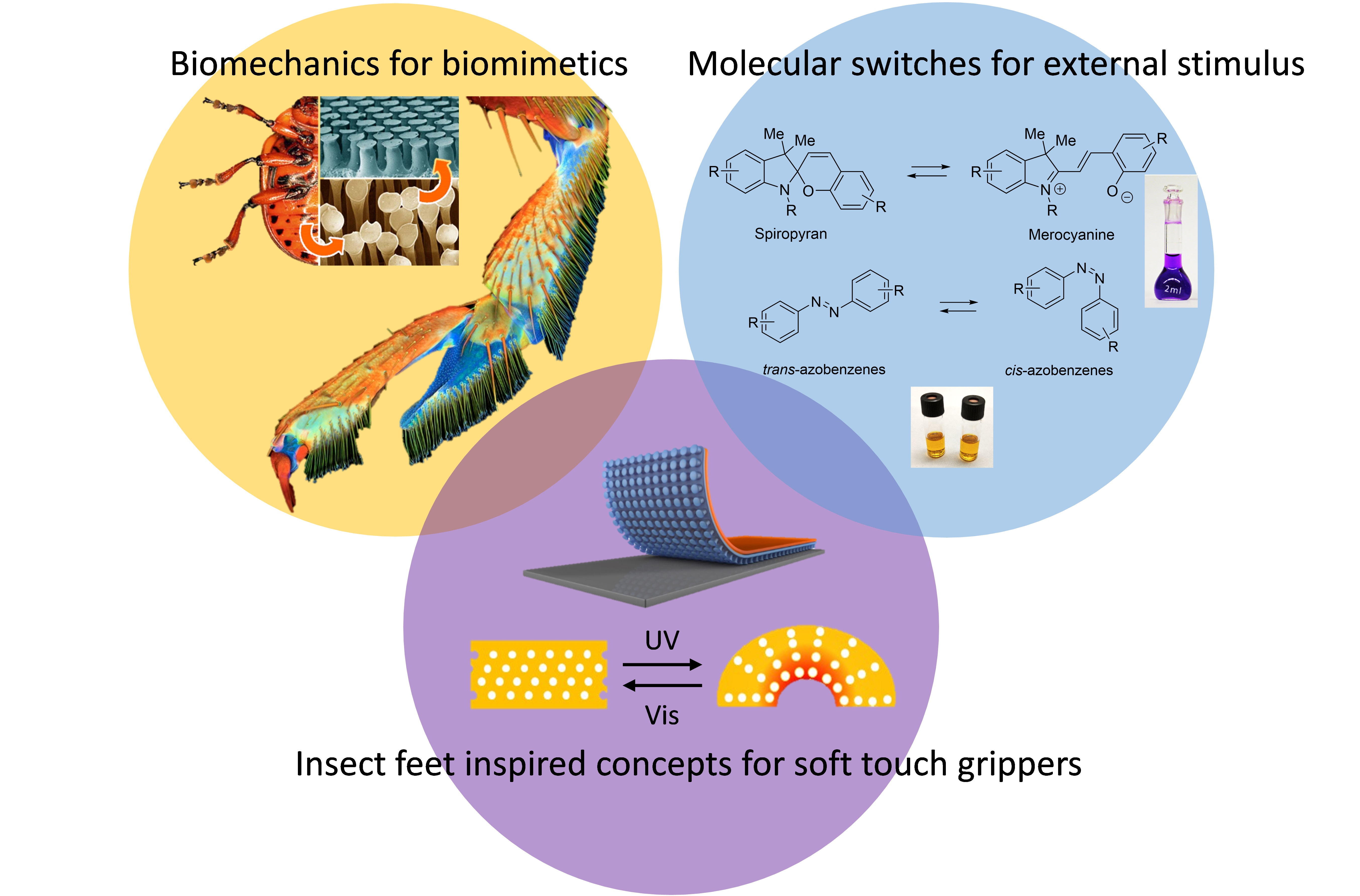
We develop bio-inspired gripping devices made of soft materials with elastic moduli in the MPa range. For this, we use new photomechanical soft polymers or polymer composites, which can change their shape quickly in a predefined, completely contactless way through the use of light of certain wavelengths. Since these materials are still relatively unknown in engineering, new gripping constructions can be developed from them that function in entirely different ways than more established concepts. So far, the movements of such photomechanical polymer films or composites with regard to the forces generated, dynamic bending kinematics and the shape dependence of the bending have been very little researched. For this reason, we plan a broad experimental approach to gain fundamental insights into the properties of such materials and systems.
The overall goals of this project are therefore
(1) the structural investigation of two types of biological gripping systems
(2) quantification of the forces and bending kinematics generated
(3) design of biologically inspired claws and testing of their kinematic performance
(4) design of new photomechanical composite systems (pmCS)
(5) Implementation of the pmCS in the soft robots. In addition, we aim to develop biologically-based concepts in order to serve the soft robotics community that is establishing itself in this SPP, as well as to make the new materials available to other members of the soft robotics community.