Untethered soft mobile milli/microrobots would have a radical impact in medicine. Such untethered tiny machines could access smaller regions inside the body, remain inside the body for long durations as semi-implantable medical devices, and enable diagnostic and therapeutic medical operations in hard or currently not possible to reach regions inside the body with minimal or no invasion. Despite their revolutionary potential in medical applications inside the human body, it is very challenging to design, fabricate, actuate, power, locomote, and control small-scale untethered soft robots, where existing macroscale soft robotic design, fabrication, actuation, locomotion, powering, and control techniques cannot be used directly. This is due to drastic changes in dominant forces on robot locomotion and dynamics at the small scale due to scaling laws, miniaturization limitations on on-board actuators, power sources, and controllers, and feature sizes of components need to be micron scale for miniature robots. Moreover, existing soft mobile robots have only single locomotion modality to navigate in complex environments.
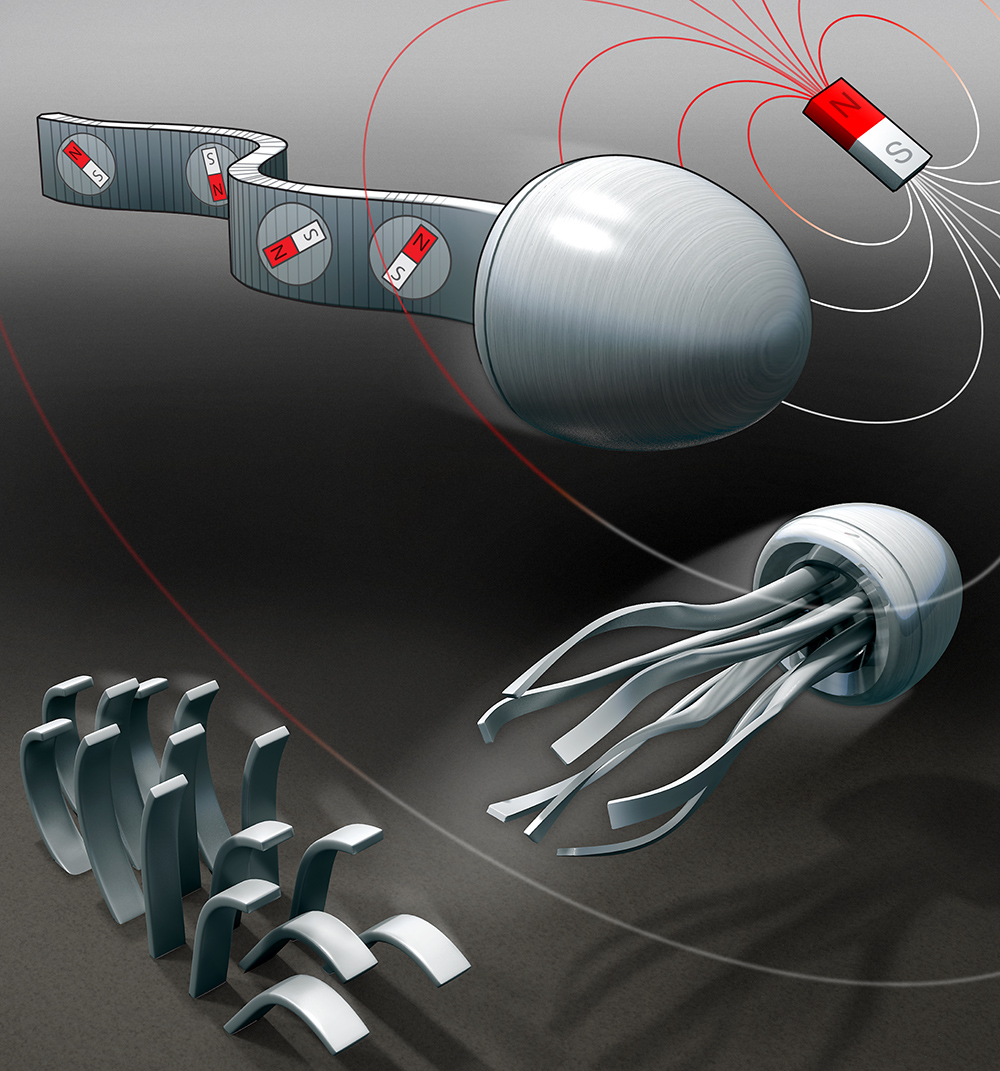
This is a critical limitation for in vivo medical operations as the robots have to navigate through the human body, which consists of tissues and liquids varying in means of morphology, elasticity, and viscosity. To resolve these challenges, this proposal aims to develop a systematic methodology for design, fabrication, and validation of miniature soft-bodied mobile robots with multimodal locomotion capabilities using magnetic soft materials. Our proposal will provide a design and fabrication methodology that can systematically merge multiple locomotion modes in a single soft-bodied miniature robot. In addition to the theoretical and experimental models that we will provide, we envision that the methodology we propose will enable various designs of soft miniature robots which are capable of improving or even revolutionizing the current medical robot-based therapies and surgeries in the future. With the ever-growing healthcare demand, this technology will eventually benefit the patients and our society as a whole.