In the past years different research groups developed and investigated a large variety of different soft material robots (SMRs). Because of their low stiffness and high flexibility, SMRs are known to be advantageous when handling objects or interacting with their environment. However, development and use of SMRs for real life applications is a challenge that is not yet overcome.
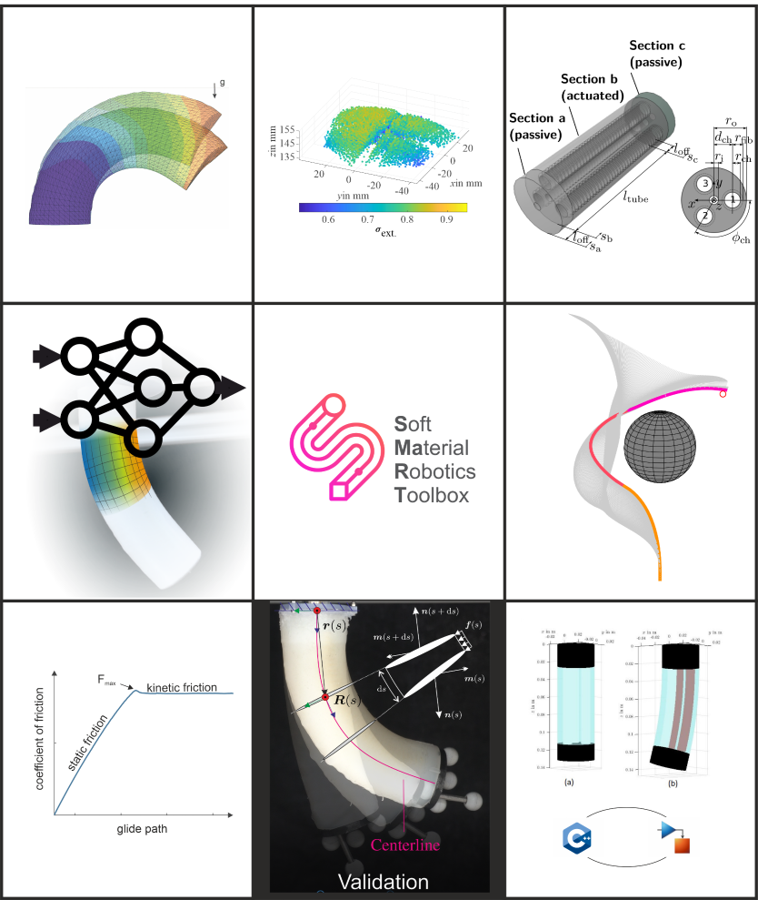
For modeling and control of SMRs assumptions are being made, that simplify the respective task and are only applicable for very specific applications. Still, to make use of the advantages of SMRs a more generalized approach to bring them into application needs to be developed. One gap that we want to tackle within this project is the integration of more complex contact phenomena in modeling, design, motion planning and state estimation of SMRs. This aspect of modeling has often been neglected until now. However, with regards to real life application it is essential to consider contact. Since human-robot interaction or handling unknown objects, is referred to as the greatest advantage of SMRs, interaction needs to be investigated. Consequently, contact with the environment, can no longer be oversimplified or neglected. During the first funding period a toolbox was developed that includes different methodologies and approaches that support the development, modeling and optimization of SMRs by the example of one soft pneumatic actuator segment. Based on this preliminary work, this subsequent research project aims to expand the toolbox with regards to real life applications. It will consider multi-segment actuators as well as further developments in modeling, design, motion planning and dynamic control.
For a goal-oriented model-based design process, we will research and develop optimization strategies that consider a complete SMR with specific tasks at hand rather than focusing on separated characteristics of a single soft actuator. For these optimization problems we research the possibility of including motion planning schemes also under consideration of contact and utilization of obstacles. Therefore, a more complex and thus more realistic contact description of soft material systems will be developed and implemented. With regards to real life applications motion planning in combination with the utilization of obstacles will be investigated.
To dynamically control free motion and estimate the systems state, also in contact with the environment, model-based approaches are studied. The overall aim is to provide an open-source toolbox that facilitates a targeted and application-oriented development of soft material robots.